 Photo by Toa Heftiba on Unsplash
Photo by Toa Heftiba on Unsplash
Master thesis - Trajectory control of high-performance omnidirectional robots
Publications
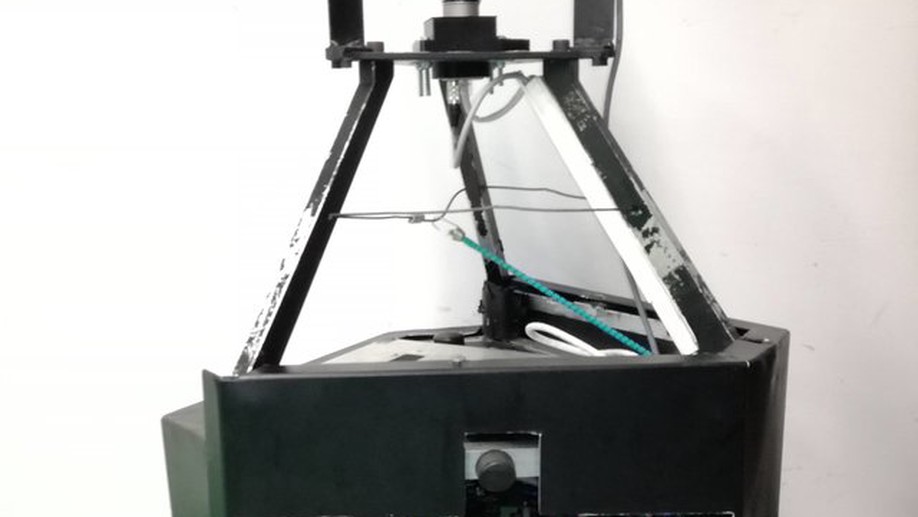
Omnidirectional robot modeling and simulation
Modelling an omnidirectional mobile robot, from 5DPO robotics soccer team, for simulation in SimTwo software.
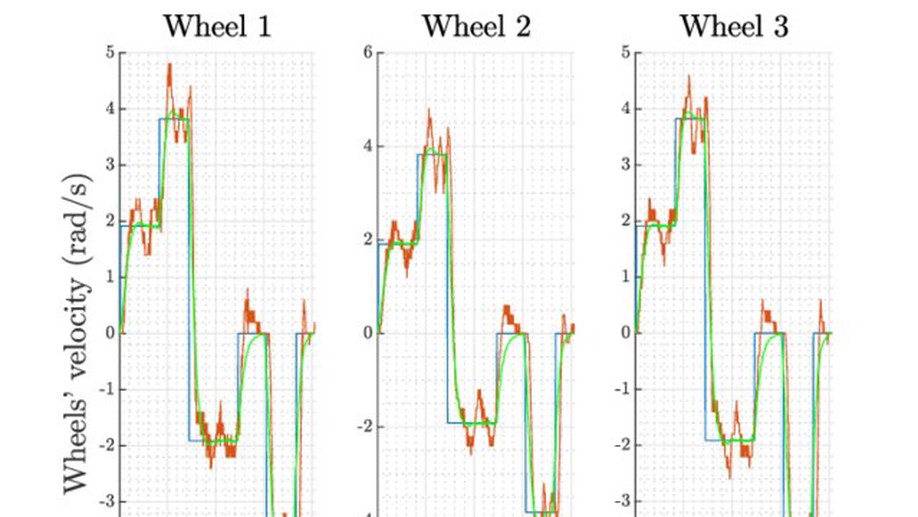
Trajectory control of a high-performance mobile robot
Moving a robot at high-speed is a complex problem. Therefore, in this master thesis, I intend to develop a high-precision trajectory tracking algorithm to pursue a target.